 )
)Introduced in a 2016 paper, Hierarchical Navigable Small World (HNSW) is the algorithm that underpins many vector databases. What sets HNSW apart from other vector indexing techniques is its approach to a common challenge in data science and artificial intelligence: efficiently finding the closest data points in large multi-dimensional datasets.
In a nutshell, HNSW creates a multi-layered graph structure where each layer is a simplified, navigable network. Think of it as a digital map of a road network. Zoomed out, you see the major roads that connect cities and towns. Zoom in to the city level, and you can see how different neighborhoods are connected. At the finest level of zoom, you can see the connections between individual buildings in a neighborhood.
Similarly, HNSW constructs layers of connections with varying degrees of reachability. This structure allows quick and accurate search, even in vast, high-dimensional data spaces. This post will explore HSNW’s inner workings, its strengths, and its weaknesses.
Why are Hierarchical Navigable Small Worlds important?
Hierarchical Navigable Small Worlds are important because they provide an efficient way to navigate and search through complex, high-dimensional data. This efficiency allows for faster and more accurate nearest-neighbor searches, which is essential in applications like recommendation systems, image recognition, and natural language processing.
By organizing data hierarchically and enabling navigable shortcuts, HNSW significantly reduces the time and computational resources needed for these searches, making it a crucial tool in handling large datasets in machine learning and AI.
Understanding similarity search
Similarity search is a fundamental technique in data science, used to find data points in a dataset that are 'nearest' to a given query; as these searches are often within a vector space, it is also known as “vector search.” Such searches are used by systems such as voice recognition, image/video retrieval, and recommendation systems (amongst others); it is also part of the forefront of generative AI, being one of the main drivers to improve performance in retrieval-augmented generation (RAG).
Traditional search methods were things like brute-force search, tree-based structures (e.g., KD-trees), and hashing (e.g., Locality-Sensitive Hashing). However, these approaches do not scale to large, high-dimensional datasets, requiring efficient solutions. A graph-based approach called Navigable Small World (NSW) improved on the scaling of its predecessors, but NSW has polylogarithmic scaling characteristics, limiting its utility in large-scale applications where there are a large number of high dimensional records.
This is where Hierarchical Navigable Small World (HNSW) comes in – it builds on NSW by introducing layers (“hierarchies”) to connect data, much like adding a “zoom-out” feature to a digital map.
Underpinnings of HNSW
Before looking at HNSW, we should first explore the Navigable Small World (NSW) and a data structure called “skip lists”, both of which make use of a graph-based data structure. In such a structure, the data (nodes) are connected by edges, and one can navigate through the graph by following these edges.
Navigable Small Words (NSW)
The principle behind Navigable Small Worlds is that every node can be reached within a small number of “hops” from any other node. So to find the closest node to a query point, we start by determining an entry node (which could be random, heuristic, or some other algorithm), the nodes adjacent to the entry are searched to see if they are closer than the current node. The search moves to the closest of these neighboring nodes and repeats until there are no closer nodes.
In the following illustration, we are searching for the node nearest to “A”, and start by looking at node “0”. That node is connected to three nodes, but the one that is closest to “A” is node “1”. We then repeat the process from node “1”, finding that node “2” is closer than node “1”, and finally that node “3” is closer than node “2”. The nodes connected to “3” are all further away from “A”, so we determine that “3” is the closest node:
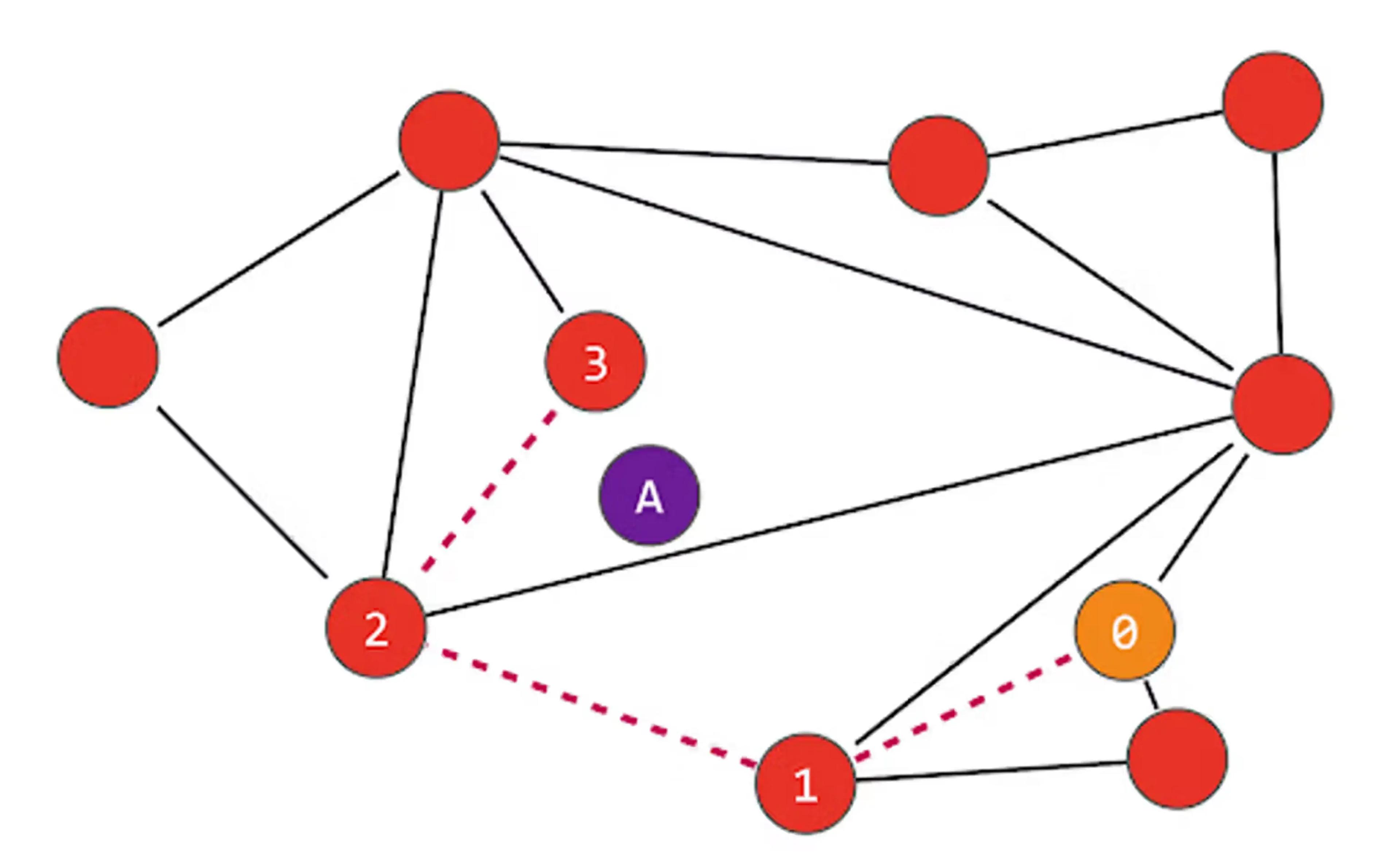
In building the graph, a parameter – usually denoted “M” – sets out the number of edges a new node will make to its nearest neighbors (the above example uses M=2). A larger M means a more interconnected, denser graph but one that will consume more memory and be slower to insert. As nodes are inserted into the graph, it searches for the M closest nodes and builds bidirectional connections to those nodes. The network nodes will have varying degrees of connectivity, in a similar fashion to how social networks contain users connected to thousands (or millions) of people and others that are connected to hundreds (or tens) of people. An additional Mmax parameter determines the maximum number of edges a node can have, as an excessive number of edges can affect performance.
Issues with NSW
One of the shortcomings of NSW search is that it always takes the shortest apparent path to the “closest node” without considering the broader structure of the graph. This is known as “greedy search” and can sometimes lead to being trapped in a local optimum or locality – a phenomenon known as “early stopping”. Consider what might happen in the following diagram, where we enter at a different node “0” with a different “A” node:
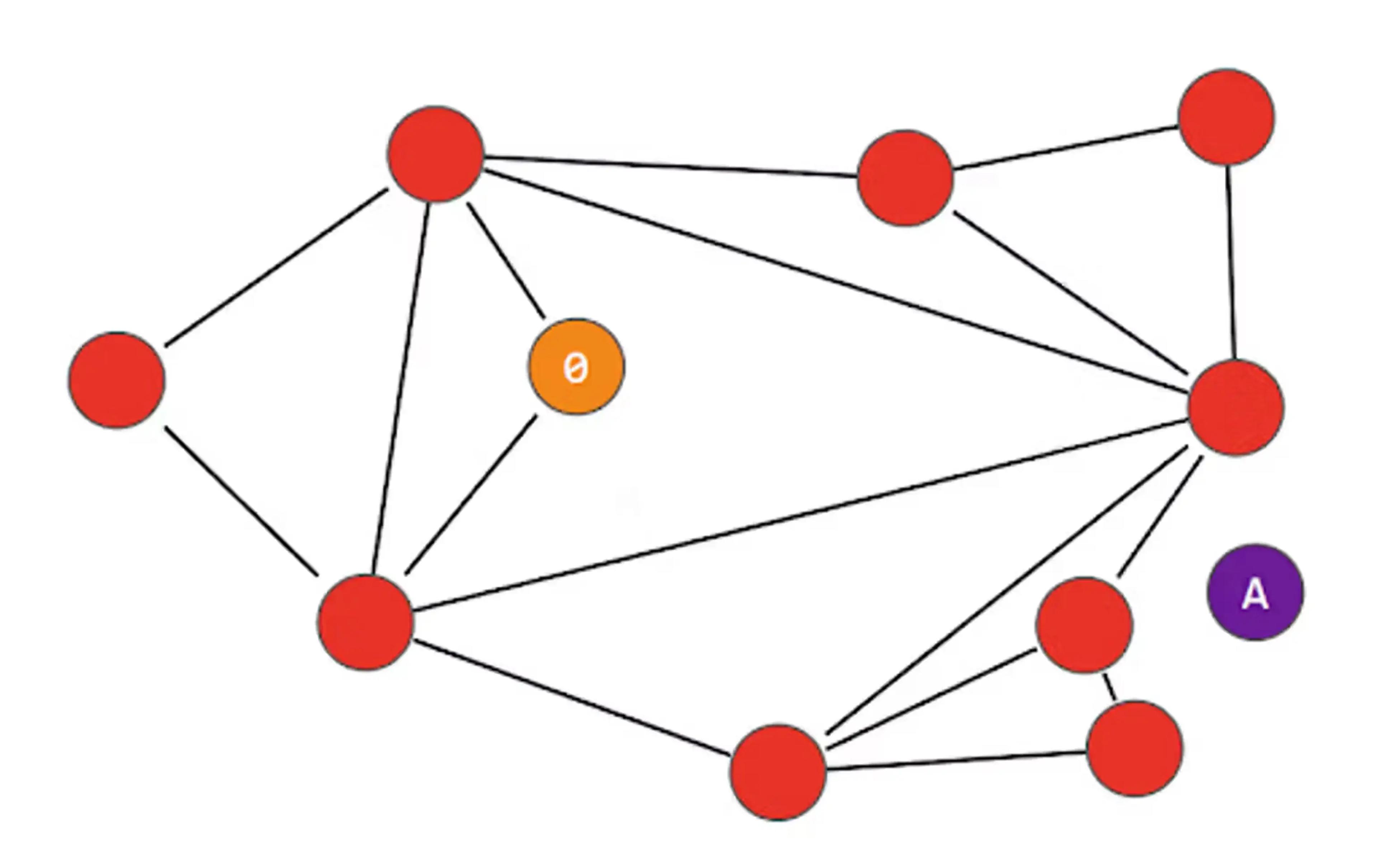
The two nodes connected to node “0” are both further away from “A”, so the algorithm determines that “0” is the closest node. This can happen at any point during the navigation, not just the starting node. It does not try to explore branches beyond any nodes that are further away, as it assumes anything further away is even further away! There are techniques to mitigate this, such as testing multiple entry points, but they add cost and complexity.
Skip Lists
Skip lists are a list structure designed for search efficiency. The structure of a skip list allows both insertion and querying operations to be performed on the order of average O(log n) – the time of the operation grows logarithmically with the amount of data, rather than linearly, polylogarithmically, or worse. At the bottom of a skip list, every node is connected to the next node in order. As more layers are added, nodes in the sequence are “skipped.” The following Wikipedia illustration shows how ten nodes might be organized into a four-layer skip list:
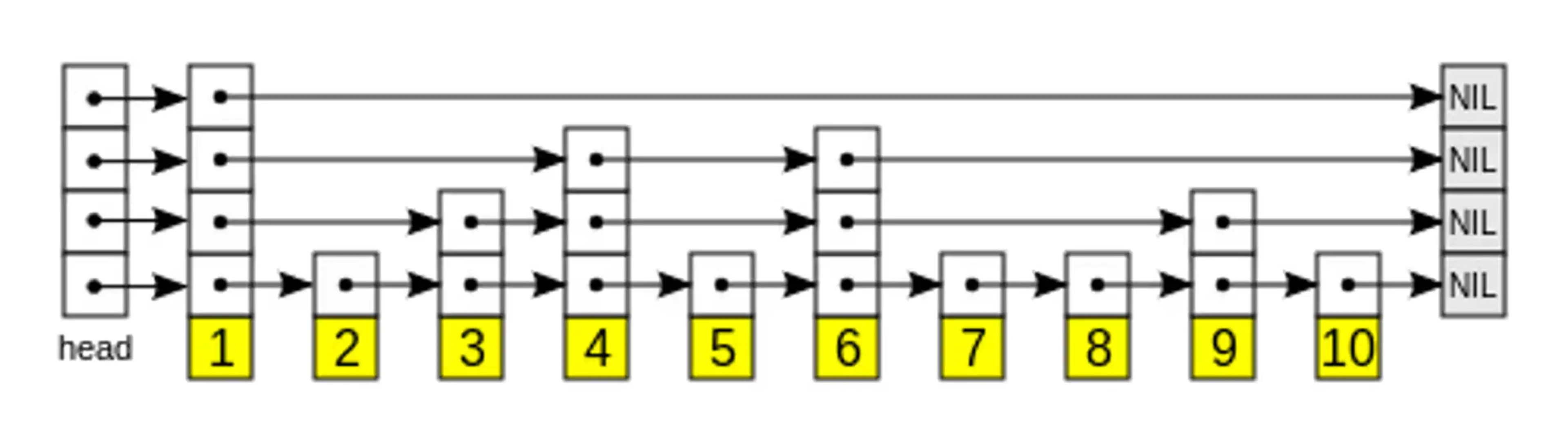
Skip lists are generally built probabilistically - the likelihood of a node appearing in a layer decreases at higher layers, which means the higher layers have fewer nodes. When searching for a node, the algorithm enters the “head” of the top layer and proceeds to the next element that is greater than or equal to the target. At this point, the search element is found, or it drops to the next (more fine-grained) layer, and the process repeats until you’ve either found the search node, or you’ve found the adjacent nodes to your search node.
Introducing Hierarchical Navigable Small Worlds (HNSW)
Transitioning from Navigable Small World (NSW) to Hierarchical Navigable Small World (HNSW) marks a shift from polylogarithmic complexity to streamlined logarithmic scaling in vector searches. HNSW marries the swift traversal of skip lists with NSW’s rich interconnectivity, adding a hierarchical twist for enhanced search efficiency.
At the heart of HNSW is its tiered architecture, which organizes data into layers of interconnected nodes, allowing rapid skips across unnecessary computations to focus on pertinent search areas. This hierarchical approach, coupled with the small-world concept, optimizes the path to high-precision results, essential for applications demanding quick and accurate retrievals.
HNSW simplifies the complexity of navigating large datasets and ensures consistent and reliable performance, underscoring its prowess in modern data-intensive challenges.
How HNSW works
Let’s go down a layer and discuss how HNSW works in more detail, including both the building and maintenance of the index, as well as conducting searches within the index.
Building the hierarchical structure
The foundation of HNSW lies in its hierarchical structure. Building this multi-layered graph starts with a base layer representing the entire dataset. As we ascend the hierarchy, each subsequent layer acts as a simplified overview of the one below it, containing fewer nodes and serving as express lanes that allow longer jumps across the graph.
The probabilistic tiering in HNSW, where nodes are distributed across different layers in a manner similar to skip lists, is governed by a parameter typically denoted as mL. This parameter determines the likelihood of a node appearing in successive layers, with the probability decreasing exponentially as the layers ascend. It's this exponential decay in probability that creates a progressively sparser and more navigable structure at higher levels, ensuring the graph remains efficient for search operations.
Constructing the navigable graph
Constructing the navigable graph in each layer of HNSW is key to shaping the algorithm's effectiveness. Graph construction parameters play a key role:
- Mmax - M and Mmax are inherited from the NSW framework. A new parameter Mmax0 is reserved for the ground layer, allowing for greater connectivity at this foundational level than at the higher levels.
- efConstruction - HNSW adds this parameter, which determines the size of the dynamic candidate list as new nodes are added. A higher efConstruction value means a more thorough, albeit slower, process of establishing connections. This parameter helps balance connection density, impacting both the search's efficiency and accuracy.
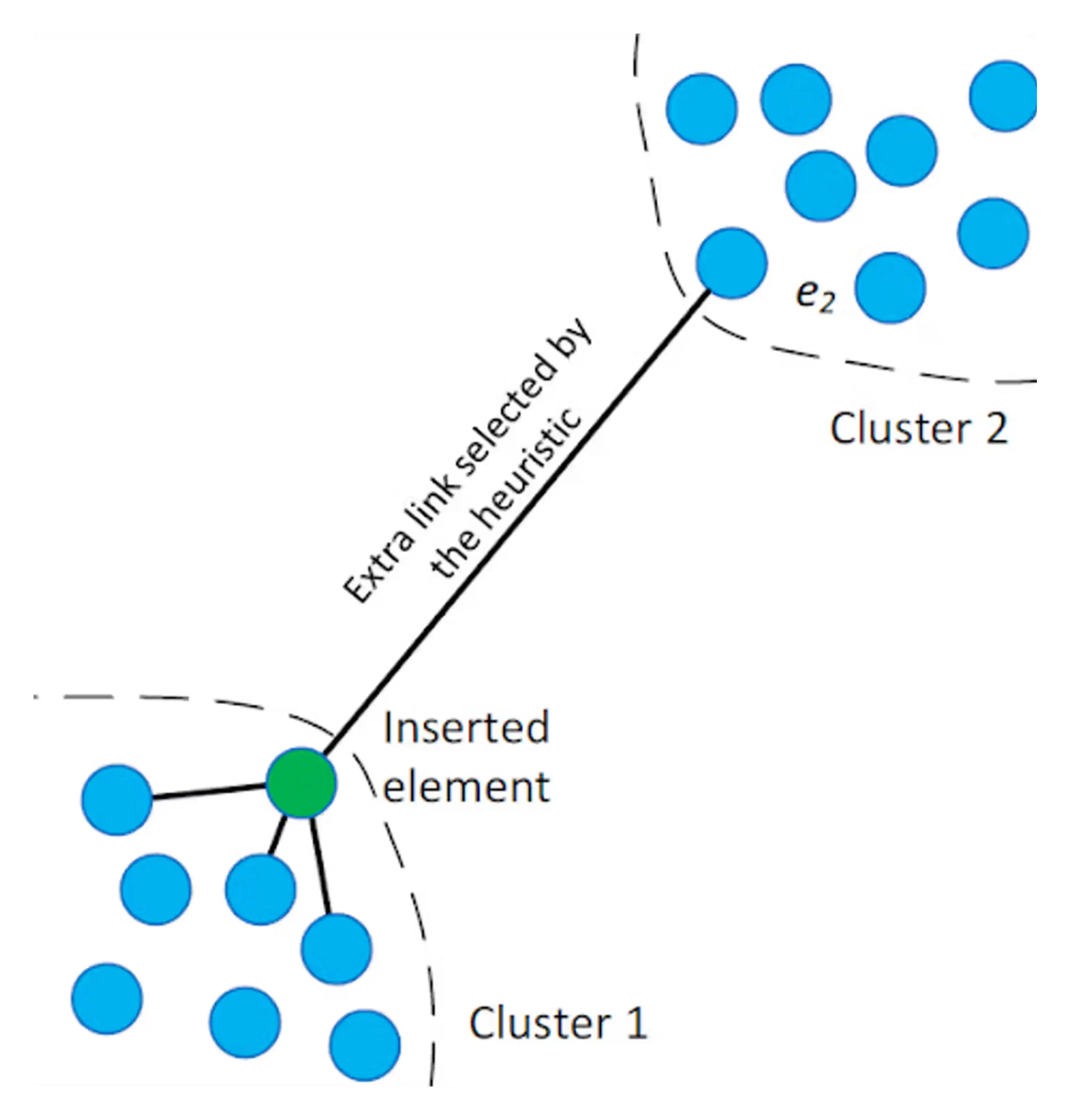
An integral part of this phase is the advanced neighbor selection heuristic, a key innovation of HNSW. This heuristic goes beyond simply linking a new node to its nearest neighbors; it also identifies nodes that improve the graph's overall connectivity. This approach is particularly effective in bridging different data clusters, creating essential shortcuts in the graph. This heuristic, as illustrated in the HNSW paper, facilitates connections that a purely proximity-based method might overlook, significantly enhancing the graph's navigability:
By strategically balancing connection density and employing intelligent neighbor selection, HNSW constructs a multi-layered graph that is efficient for immediate searches and optimally structured for future search demands. This attention to detail in the construction phase is what enables HNSW to excel in managing complex, high-dimensional data spaces, making it an invaluable tool for similarity search tasks.
Search process
Searching in HNSW involves navigating through the hierarchical layers, starting from the topmost layer and descending to the bottom layer, where the target's nearest neighbors are located. The algorithm takes advantage of the structure's gradation – using the higher layers for rapid coarse-grained exploration and finer layers for detailed search – optimizing the path towards the most similar nodes. Heuristics, such as selecting the best entry points and minimizing hops, are employed to speed up the search without compromising the accuracy of the results.
If we revisit our simple NSW example from above, we can see how the HNSW search process works. Looking for the nearest neighbor of node “A”, we start by picking a node on the top-most Layer 2 and navigating (as with NSW) to its nearest neighbor node “1”. At this point, we go down a layer to Layer 1, and search to see if this layer has any closer neighbors, which we find as node “2”. We finally go down to the bottom Layer 0, and find that node “3” is closest:
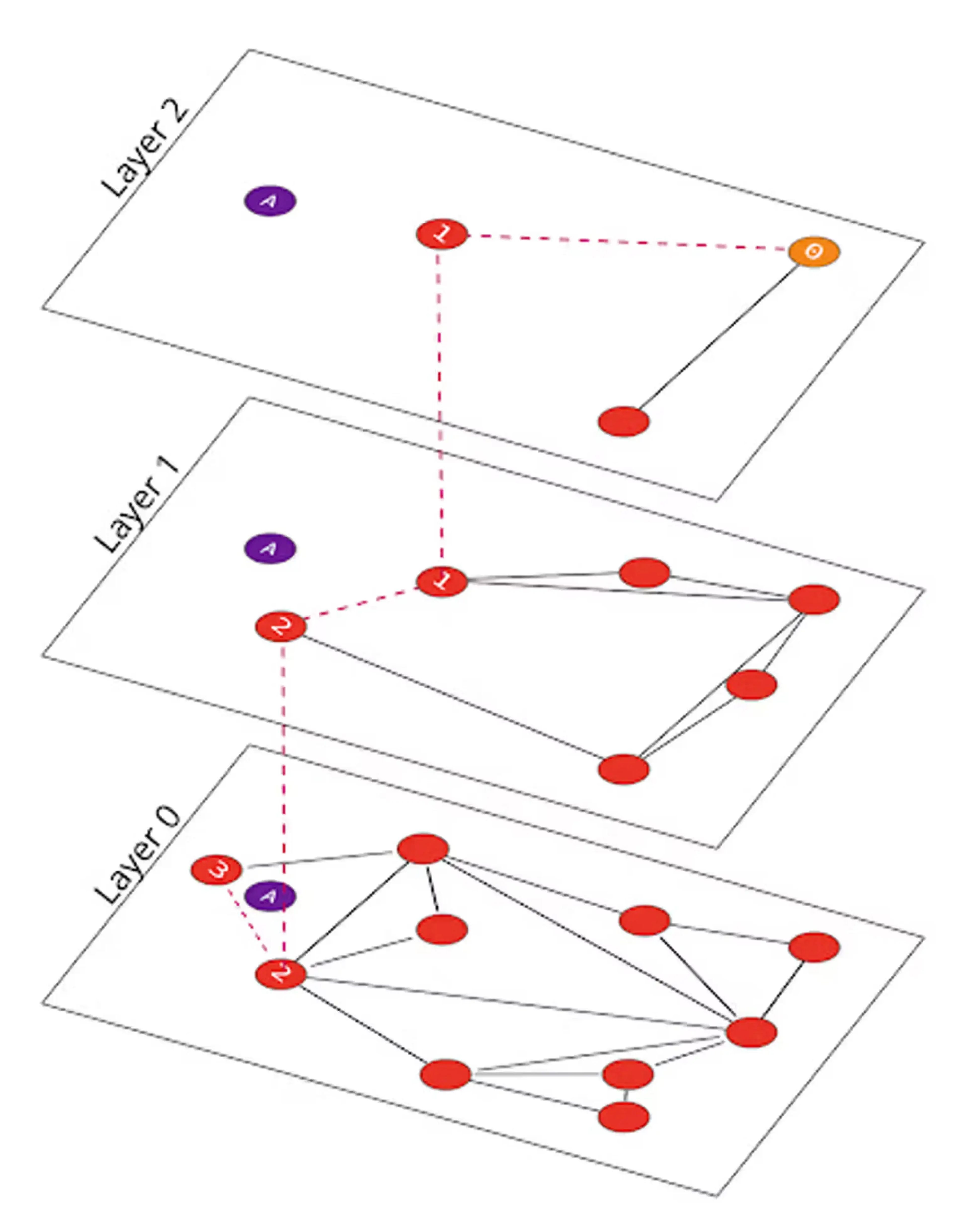
Searching within HNSW is similar to searching within NSW, with an added “layer” dimension that allows quick graph pruning to only those relevant neighbors.
Benefits and limitations of HNSW
As with most any technology, for all the improvements HNSW brings to the world of vector search, it has some weaknesses that may not make it appropriate for all use cases.
Benefits of HNSW
- Efficient Search Performance: HNSW significantly outperforms traditional methods like KD-trees and brute-force search in high-dimensional spaces, making it ideal for large-scale datasets.
- Scalability: The algorithm scales well with the size of the dataset, maintaining its efficiency as the dataset grows.
- Hierarchical Structure: The multi-layered graph structure allows for quick navigation across the dataset, skipping irrelevant portions of data.
- Robustness: HNSW is known for its robustness in various datasets, including those with high dimensionality, which often pose challenges for other algorithms.
Limitations of HNSW
- Memory Usage: While efficient for search operations, HNSW's graph structure can be memory-intensive, especially with a large number of connections per node. This imposes practical limitations on graph size, as fast HSNW operations can only happen in memory.
- Complex Implementation: The algorithm's hierarchical and probabilistic nature makes it more complicated to implement and optimize than simpler structures.
- Parameter Sensitivity: HNSW performance can be sensitive to its parameters (like the number of connections per node), requiring careful tuning for optimal results.
- Potential Overhead in Dynamic Environments: While HNSW is efficient in static datasets, there can be significant overhead maintaining the graph structure in dynamic environments (where data points are frequently added or deleted).
In conclusion, while HNSW offers significant advantages in search efficiency and scalability, especially in high-dimensional spaces, it comes with trade-offs regarding memory usage and implementation complexity. These factors must be considered when choosing HNSW for specific applications.
Try a vector database that has all of the benefits of HNSW
HNSW improved on its predecessors, enabling faster search for large multidimensional datasets, but this comes with practical limitations on memory usage. f you are looking for a vector database that has the strengths of HNSW but eliminates the memory and concurrency problems found in implementations, have a look at DataStax Vector Search, which uses the open-source JVector project.
